Multibody Quadcopter Simulator
copterdyn
copterdyn is a sophisticated simulator for a quadcopter modeled using multibody simulation concepts. The quadcopter is partitioned in five bodies, each with individual physical characteristics, like inertia, geometry, mass, and the multibody mathematical core solves all differential equations describing the dynamical behavior.
Additional differential equations might easily be plugged and solved together. The propellers, for example, are modeled by a second order transfer function to have their transient dynamical effects also simulated.
The simulation is written in Python, object oriented, with an object called cmyquad, which might be a reference when one wants to model a different quad but use the same numerical kernel of this simulation. A model includes:
- masses
- inertial characteristics
- length of each copter arm
- angles between body frame and each arm
- tilt angle between vertical and thrust (misalignment)
Most of quad simulations considers that each arm is separated by 90[deg] angles from each other, has same lengths, all motors are equal, the inertia tensors are diagonal, the thrust vectors are all parallel to each other, and the gyroscopic effect of the propellers are negligible. With this assumptions, one can develop a control project. The remaining question is: how would this control project work with the tolerances, imperfections and misalignments of a real quad? Such a simulation can be run hundreds of times with randomly selected model values, and a statistical analysis of the results can lead to better solutions, either concerning quad parts, or software project.
bodies
It is time to clarify the meaning of "a quadcopter with five bodies". This picture depicts the bodies.
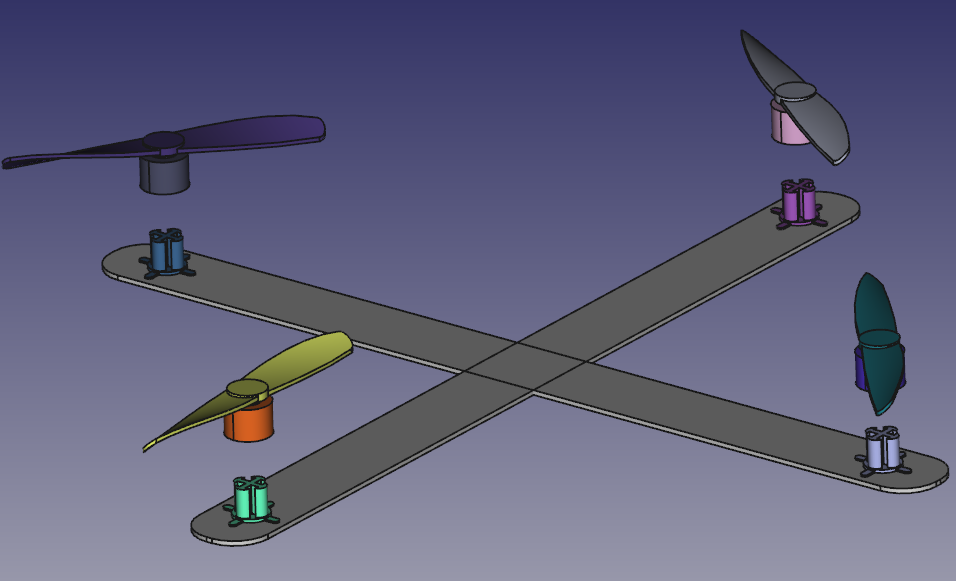
- central body supporting arms, electronics, batteries, and the static part of each motor;
- four sets of propellers+rotors.
geometry
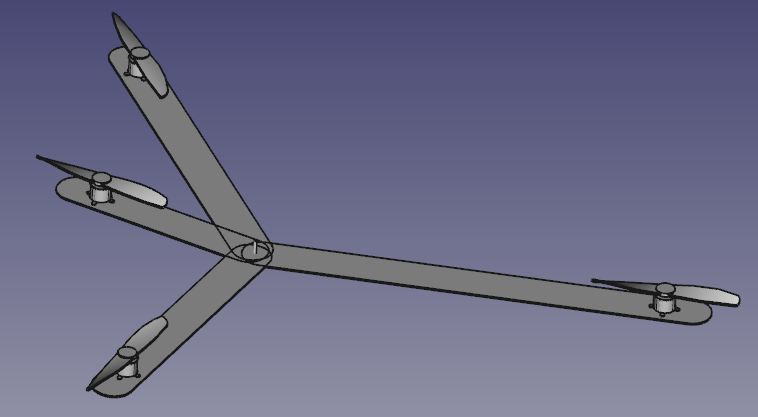
As mentioned above, this simulator allows some additional degrees of configuration. The traditional setup of orthogonal arms with same length is not necessary anymore. An unusual configuration like this is allowed:
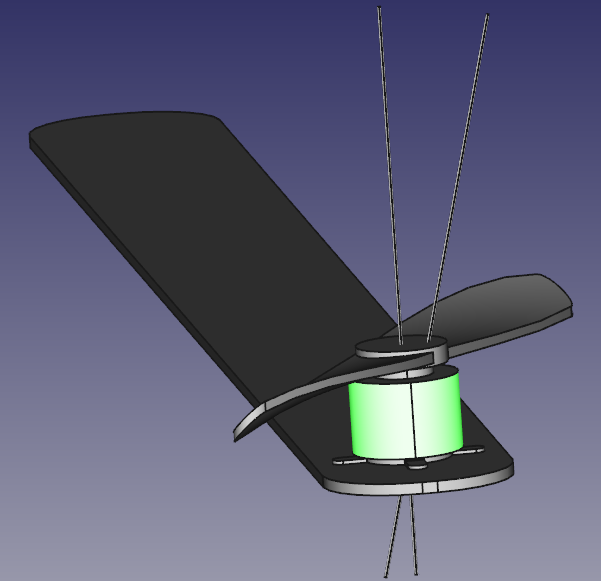
Moreover, a tilt in the thrust vector is also allowed (and necessary for a good simulation!), like this:
frames
Internally the orientation of frames is adopted as: X forward, Y right, Z down.
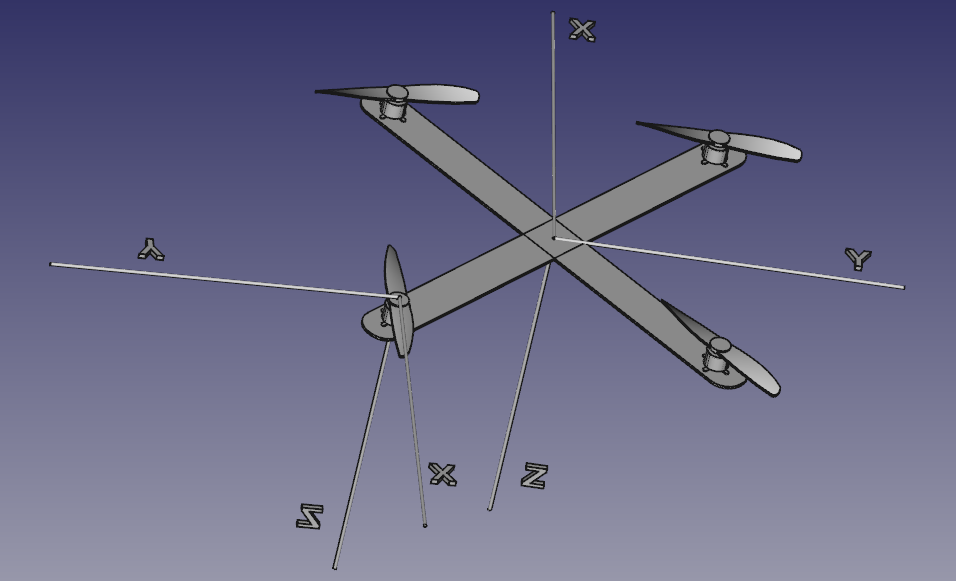

Each body has its own frame, therefore one might get the propeller angle directly from its Euler angles.
current status
The project of cmyquad still does not have a controller. That said, please do not expect to see well-behaviored-flying quads. Here you can check some current results:
1) perfectly symmetrical aligned quadcopter with four perfect equal propellers.
2) one of the perfect equal propellers is not so perfect and generates a thrust vector with a misalignment of 3[deg].
3) one of the arms is placed at 87[deg] instead of 90[deg].
It is worthless to say that a quadcopter without control is unstable, right?
how to run
$ ipython >>> %run simuquad.py
how to change
Here you find some hints where to start from.
change structural parameters
Go to the first lines of cmyquad.__init__(). There you can play with masses, inertia, arms length, and angles. Make your changes and run it again.
where to plug the control
Go to the first lines of cmyquad.pre_update(). The variable u is fed equally to each propeller model. The controller will calculate the appropriate value of each u.
propeller model
Take a look at cprop methods.
animated gif
In the file simuquad.py, look for a line with sq.cshowquad3d(). Enable it to have a .gif file for each run.
roadmap
Some ideas to continue this work are the modeling and implementation of:
- a minimal controller, in order to have some longer and more realistic simulations;
- a better propeller model;
- navigation, sensor models, estimators;
- effect of wind (disturbances) (torques and forces);
- guidance (optimal trajectory planning);
- and so on...